


| สถานที่กำเนิด: | เหอเจียน ประเทศจีน |
|---|---|
| ชื่อแบรนด์: | Beyde |
| หมายเลขรุ่น: | JLK630/8+12+24 |
| จำนวนสั่งซื้อขั้นต่ำ: | 1 SET |
| รายละเอียดการบรรจุ: | การโหลดคอนเทนเนอร์ด้วยการบรรจุที่ปลอดภัย |
| เวลาการส่งมอบ: | 90 วันหลังจากได้รับเงินมัดจำ |
| เงื่อนไขการชำระเงิน: | L/C, T/T |
| สามารถในการผลิต: | 120 ชุด/ปี |
| การรับประกัน: | 12 เดือน | บมจ: | ซีเมนส์ |
|---|---|---|---|
| การใช้งาน: | การควั่น | สายเข้า: | 1.5-5.0มม |
| ลากสูงสุด: | 70มม | หมุนได้สูงสุด: | 200r/นาที |
| หัวห่อ: | ตัวเลือก | มอเตอร์: | ซีเมนส์ |
| ซื้อขึ้น: | 2500มม | การจ่ายเงิน: | 2500มม |
| กว้าน: | 2000มม | วัสดุ: | ตัวนำทองแดงและอลูมิเนียม |
| ขนาดสูงสุด: | 1000 มม2 | <i>Max.</i> <b>สูงสุด</b> <i>Traverse Pitch</i> <b>ทราเวิร์ส พิทช์</b>: | 120มม |
| พลังงาน: | AC380-415V/50Hz | ||
| แสงสูง: | เครื่องตัดสายเคเบิล ac380v,อุปกรณ์สกรีนสายทองแดงสําหรับสายเคเบิล,แอนด์เรอร์แข็ง AC380V |
||
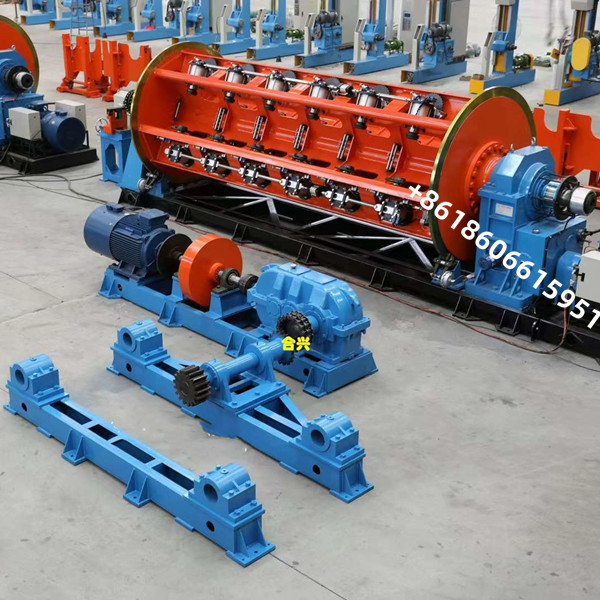
อุปกรณ์กรองและติดสายทองแดงชนิดแข็ง
1.ลักษณะและข้อดี
| Ø 630 ราคาถอนเงิน | 1 ชุด |
| # รากสายนําทาง | 1 ชุด |
| 6.12. โบบินส แบรนด์เคจ | ทุกชุด 1 ชุด |
| 6.12. โบลิน อุปกรณ์โบลินการบรรทุก | ทุกชุด 1 ชุด |
| การประกอบตัวถือสกัด | 1 ชุด |
| หัวกระชับ | 2 ชุด |
| เครื่องวัดดิจิตอล | 1 ชุด |
| Ø 1400 แรงแรงสองแคปสแตน (มีอุปกรณ์หยุดลม) | 1 ชุด |
| Ø 1600 ระบบรับแบบปลายแกน | 1 ชุด |
| ตู้ควบคุมไฟฟ้า | 1 ชุด |
| รั้วป้องกันความปลอดภัยและปกปิด | 1 ชุด |
5.1.1 รายละเอียดของลวดจ่าย: PND500 ~ PND630
5.1.2 ความจุสูงสุด: 0.4t
5.1.3 ความตึงเครียดที่จ่ายออกถูกควบคุมโดยการขัดกลและสามารถปรับได้
5.1.4 โครงสร้างไม่มีแกน และสกรูนํามือจะยกและลดสกรีน และจับหรือปลดสกรีน
5.1.5 มีฟังก์ชันการตัดต่อ, ปิดและป้องกันการชําระค่าตอบแทน
5.2.1. ความเร็วสูงสุดของกรงลอย:
6 โคลบิน: 230r/min (โคลบินบรรทุกเต็ม)
12 โบลิน: 198r / min (โบลินบรรทุกเต็ม)
5.2.2พลังงานของมอเตอร์:
6 โคลบิน: 55kw (AC)
12 สลิป: 55kW (AC)
5.2.3ระยะการปรับเสียง: ปรับได้โดยไม่มีขั้นตอน
5.2.4 แต่ละส่วนของหมุนถูกขับเคลื่อนโดยมอเตอร์แอลเอซีแยกแยกผ่านกล่องเกียร์พิเศษ, ซึ่งสามารถหมุนไปทางซ้ายและขวากล่องเกียร์มีสองเกียร์ความเร็วสูงและความเร็วต่ําเกียร์ความเร็วสูงถูกใช้สําหรับ stranding ปกติและเกียร์ความเร็วต่ําถูกใช้สําหรับการเปลี่ยนดิสก์. มอเตอร์หลักขับเคลื่อน winch ให้หมุนช้า ๆ มือถือใช้ในการเปลี่ยนตําแหน่งของแผ่นแขวนโดยอัตโนมัติ
5.2.5 โครงสร้างกรอบ ผังทั้งหมดถูกรองรับสองครั้งโดยกรอบรองรับด้านหน้าและด้านหลัง และส่วนกลางถูกรองรับโดยท่อเหล็กไร้รอยพื้นผิวเชื่อมแผ่นเหล็กหลักของกรอบถูกประมวลผลและ welded โดยความแข็งแรงสูงหักกลับ. กรอบทั้งหมดที่ผสมผสานถูกผสมผสานในเตาผงผสมผสานในอุณหภูมิสูง, และการปรับปรุงและความเครียดที่เกิดจากการผสมแผ่นเหล็กถูกนําไปปฏิบัติการเร่งความแก่หลังจาก 72 ชั่วโมง, มันถูกเย็นลงตามธรรมชาติถึงอุณหภูมิธรรมชาติ, ปรับปรุงความแข็งแรงของกรอบทั้งหมดได้อย่างมีประสิทธิภาพและอนุญาตถูกจัดไว้สําหรับรูติดตั้งด้านบนหลังจากที่หลุมทั้งหมดถูกเจาะ, การประมวลผลและบดในศูนย์การแปรรูป gantry, พวกเขาสามารถเสร็จสิ้นบน lathe ทาแน่นหนัก.แผ่นด้านล่างของ hinge ได้ welded ด้วยท่อสี่เหลี่ยม, ซึ่งเพิ่มความมั่นคงของหมุนเวียนได้อย่างมีประสิทธิภาพเมื่อเทียบกับแผ่นล่างเหล็กช่องทั่วไปและเหมาะสมสําหรับการหมุนของหมุนเวียนความเร็วสูงการทดสอบความสมดุลแบบไดนามิคหลังจากการประกอบมุมคานตอบสนองความต้องการของการทํางานที่มั่นคงในความเร็วสูง.
5.2.6 เส้นเดียวที่จ่ายความตึงเครียดถูกปรับโดยพัดปุ่มปรับสัดส่วนปนูเมติกที่นําเข้าจากญี่ปุ่น โดยการตรวจจับอิเล็กทรอนิกส์และการควบคุมไฟฟ้าซึ่งสามารถทําความเป็นจริงเส้นเดียวคงที่ จ่ายออกความตึงเครียดจาก รีลเต็มไปยัง รีลว่าง.
5.2.7 รีลใช้หมัดลมปลายแกน และกระบอกอากาศ clamps รีลจากด้านล่างไปด้านบน ซึ่งเป็นความสะดวกสําหรับรีลที่จะขึ้นและลง หลังจากรีลสายถูก clampedระบบล็อคความปลอดภัยแบบกลไกแบบลมล็อคกัน
5.2.8 โดยใช้ปริมาณดิจิตอลในการตรวจพบการแตกของสายไฟ สามารถตัดสินสัญญาณการแตกของสายไฟของสายไฟใด ๆ ในแต่ละส่วนของ hinge ได้อย่างแม่นยําและแสดงส่วนไหนและสายที่แตกบนจอสัมผัสของคอนโซลหลัก. ความยาวการหยุดการตรวจสอบการแตกของสายคือภายใน 2m (เมื่อความเร็วสายคือ 20m / นาที),ซึ่งช่วยเพิ่มความแม่นยําและความแม่นยําในการตรวจจับการแตกของสายไฟ และรับประกันความแม่นยําในการตรวจสอบ.
5.2.9 การดําเนินการแขวนของแต่ละส่วนของหมุนใช้เกียร์ช้าบนกล่องเกียร์หมุนโดยมอเตอร์หลักเพื่อหมุนช้าเพื่อตําแหน่งช้าสวิตช์ความใกล้ชิดที่ใช้ในการตรวจจับสัญญาณการตั้งตําแหน่งกระแทกเพื่อให้แน่ใจว่าตําแหน่งแขวนถูกต้อง.
5.2.10 พื้นผิวของแผ่นความดันจะต้องเคลือบ เพื่อให้มั่นคงและสมดุลความดัน
5.2.11 แต่ละส่วนของ hinge ใช้รั้วป้องกันชนิดผนังและชนิดคง
5.2.12 ทุกส่วนของลินช์มีอุปกรณ์วางแผ่นแขวนอยู่ใต้ด้านไฮดรอลิก
5.2.13 แต่ละส่วนของร่างกายที่บิดมีชุดของอุปกรณ์การปรุงล่วงหน้าสายเดียวซึ่งใช้สําหรับการติดสายเดียวแบบกลม เพื่อให้แน่ใจว่าสายเดียวจะไม่ปลดตัวหลังจากที่ส่วนของสายนําถูกตัดต่อหลังจากที่ติดสาย.
5.2.14 ช่องกรงขาของเครื่องมีส่วนเดียว มีท่อป้องกันกลาง
5.3 อุปกรณ์อัตโนมัติในการลดและลดคลินบิน:
5.3.1 รีลที่ใช้: PDND630mm
5.3.2 อุปกรณ์กระบอกบรรทุกนี้เป็นอุปกรณ์แผ่นแขวนอัตโนมัติที่ด้านล่างของด้านขับเคลื่อนไฮดรอลิก ซึ่งประกอบด้วยกลไกการเติมของแผ่นบนและล่างกรอบล่าง, เครื่องกลไกแผ่นแขวนหมุน, รถไฟคู่นําการเคลื่อนไหวเชิงเส้นและระบบไฮดรอลิก
5.3.3 เมื่อกลไกหมุนอยู่ในตําแหน่งแนวราบ กลมไฟถูกผลักไปในตําแหน่งคงที่จากแผ่นหมุนกลมด้านบน และระบบขับเคลื่อนไฮดรอลิกเริ่มทํางาน The piston rod of the winch connected oil cylinder extends (the wire reel bracket and the piston rod are connected in a hinged manner) to drive the upper reel device to turn over with the fixed shaft as the base point. เมื่อหมุนไปยังมุมที่กําหนด, พื้นที่ด้านล่างของรถเลื่อน guide ติดต่ออุปกรณ์ขีดจํากัดบนแผ่นด้านล่างของ winch และหยุดหมุน.,และสแตนเลสของกลมขับเคลื่อนเคลื่อนเป็นเส้นตรงตามรถเลนนําทางไปข้างใต้การกระทําของคู่รถเลนนําทางการเคลื่อนไหวเส้นตรง เมื่อกลมบรรลุตําแหน่งจับของลินช์สายพิสตันของกล่องน้ํามันหยุดยืดภายใต้การกระทําของสวิทช์ขีดจํากัด, และอุปกรณ์ clamping winch ทํางานเพื่อ clamping รีล.
5.3.4 หลังการติดตั้งสายสลีน, พิสตองกระบอกจะลดลง, และสแตนเลสสายสลีนจะเคลื่อนไหวตามเส้นตรงลงไปตามรถเลื่อนทาง. เมื่อมันเคลื่อนไหวไปยังขีดจํากัดที่ด้านล่างของรถเลื่อนทางหมุนลวดไฟฟ้าหยุดเลื่อน, และกองยึดสลิงและรถเลนนําทางในทั้งสองข้างหมุนไปตามแกนคงที่จนกระทั่งพิสตองกระบอกลดลงสู่ด้านล่างและสแตนเลสสลีนบราคเกตกลับไปที่ตําแหน่งแนวราบ.
5.3คุณสมบัติ: พื้นที่ขนาดเล็กและดูแลง่าย การใช้งานง่ายและมีประสิทธิภาพสูง ความสมบูรณ์แบบที่แข็งแรงและสภาพการทํางานที่สะอาด
5.4 ตารางวัด: (เครื่องจักรกล อิเล็กทรอนิกส์)
5.4.1 ขอบเขตของล้อเมตร: 500 มม (ความกว้างล้อ ≥ 50 มม)
5.4.2 เครื่องนับเมตรใช้ เครื่องนับเมตรอิเล็กทรอนิกส์แบบกลไกแบบกลไกแบบกลไก, สามารถทําการนับเมตรกลไกและนับเมตรอิเล็กทรอนิกส์
5.4.3 ด้วยฟังก์ชันการแก้ไขตัวประสาน การนับเมตรแม่นยําและน่าเชื่อถือ และความแม่นยําของการนับเมตรคือ ± 0.3%
5.4.4 ความยาวสูงสุดในเมตร: 9999 มิลลิเมตร
5.5Ø1400 เครื่องปรับความแรงสองล้อ:
5.5.1 กว้างจริงของล้อดึง: Φ 1400mm
5.5.2 ความเร็วแรงดึงเส้นตรงสูงสุด: 45m/min
5.5.3 ความแรงดึงสูงสุด: 6t
5.5.4 พลังงานของมอเตอร์: 55kw (มอเตอร์ความถี่แปร AC)
5.5.5 โครงสร้างแรงดึงเป็นล้อคู่และล้อแรงดึงสองคู่เครื่องยนต์การดึงขับเคลื่อนพีเนี่ยนหลังจากลดความเร็วผ่านเครื่องลดความเร็วที่มีอัตราความเร็วขนาดใหญ่ที่จะขับเคลื่อนวงจรเกียร์ขนาดใหญ่บนล้อการดึงสองหมุน.
5.5.6 วงล้อดึงเป็นส่วนโครงสร้างที่เชื่อมและกระชับ; ช่องของวงล้อดึงเป็นรูป U (ช่อง 5 และ 6)ซึ่งถูกแปรรูปโดย CNC ทอร์นท์ตั้งเพื่อให้แน่ใจว่ารูปร่างของรูล็อฟเป็นแม่นยํา, กว้างด้านล่างคือเหมือนกัน, และพื้นผิวของลําเลียงล้อแรงดึงถูกเคลือบด้วยการเสร็จผิวสูง.
5.5.7 เครื่องส่งเกียร์ ผลิตจากเหล็กท่อ
5.5.8 ติดด้วยอุปกรณ์หยุดอากาศ เพื่อให้แน่ใจว่าสายไฟไม่ปลด และความสม่ําเสมอในการจอดรถ
5.6 Ø 1600 กรอบรับแบบแกนปลาย
5.6.1 ความจุภาระสูงสุด: 6t
5.6.2 กว้างสูงสุดของสายเคเบิล: 30 มม.
5.6.3 ความเร็วสูงสุดในการรับ: 50m/min
5.6.4 รายละเอียดของกล่องรับ: PN800 ~ PN1600
5.6.5 มอเตอร์รับ: 4.0kW (มอเตอร์ความถี่แปร AC)
5.6.6 มอเตอร์ปัก: 0.75KW (AC)
5.6.7 มอเตอร์ยกม้วน: 2 ชุดของ 0.75 kW (AC)
5.6.8 มอเตอร์เคลื่อนที่สําหรับการจัดตั้งสายไฟ: 0.75KW (AC)
5.6.9 ติดตั้งภายใต้โครงสร้างใต้พื้นฐาน โครงสร้างเสาเปิดและปิด การยกไฟฟ้า การจับและปลดคลื่นสายเคเบิล
5.6.10 เครื่องรับใช้มีมอเตอร์ความถี่แปรแบบ AC ที่ควบคุมโดยเครื่องแปลงความถี่ และความเข้มข้นรับใช้คงที่และปรับได้
5.6.11 ความเร็วการล่อติดตามความเร็วการล่อ ความยาวของการล่อเป็น stepless และปรับได้ และมีฟังก์ชันการปรับการล่อเร็ว
5.6.12 พร้อมการป้องกันการจับสอย, การป้องกันขอบขอบด้านบนและด้านล่าง และการป้องกันปลายทางข้าม
5.6.13 พร้อมมือใช้ไฟฟ้า
![]()
![]()
![]()
![]()
5อุปกรณ์ที่มีระบบควบคุมความตึงเครียดคงที่และระบบเบรกที่ฉลาด:
โดยการติดตาม ((Supersonic) ความยาวของสายที่ม้วนบน bobbin ความยาวของสายที่เหลือบน bobbin จะถูกตรวจจับและส่งต่อ PLCPLC จะควบคุมการรับอากาศโดยวาล์วสัดส่วนและทําให้ความตึงของ wie เสมอตามความยาวของสายที่เหลือ. สองกลุ่มควบคุมความตึงเครียดของเบรคไฟฟ้าสําหรับการจ่ายออกเพื่อให้ความดันบนไฟฟ้าเท่ากัน ระบบเบรค Pneumatic ถูกควบคุมโดยระบบเบรคที่ปัญญาเมื่อแรงหยุดของเครื่อง, สัญญาณความเร็วของแต่ละกรงจะถูกส่งไปยัง PLC โดยตัวส่ง PLC จะทําการคํานวณโดยอัตโนมัติและให้แรงเบรกที่แตกต่างกันกับแต่ละกรงโดยวาล์วสัดส่วนตามจากนั้นกรงที่แตกต่างกันจะหยุดสynchronized.
6ระบบควบคุมไฟฟ้า:
ระบบควบคุมร่วมสําหรับ strander มอเตอร์แยกแตกต่างกันจากระบบ strander ที่คล้ายกันอื่น ๆ โดยผู้ผลิตอื่น ๆ. มันง่ายที่จะใช้งานโดยการตั้งค่าของปารามิเตอร์ทั้งหมดบนจอสัมผัสปริมาตรกระบวนการทั้งหมดสามารถเรียกคืนระบบการเก็บข้อมูลและวันที่เฉพาะเจาะจง ให้เครื่องทํางานได้อย่างมั่นคงและเป็นจริงความแม่นยําของความยาววางที่น้อยกว่า 3% เมื่อหยุดฉุกเฉินและน้อยกว่า 1% เมื่อหยุดปกติของสาย (การควบคุมการสื่อสาร Profibus).
![]()
![]()




